Adaptive Communications and Trajectory Design for UAV-assisted Wireless Networks: a Multi-Scale Decision Framework
Funded by the National Science Foundation under grant 2129015

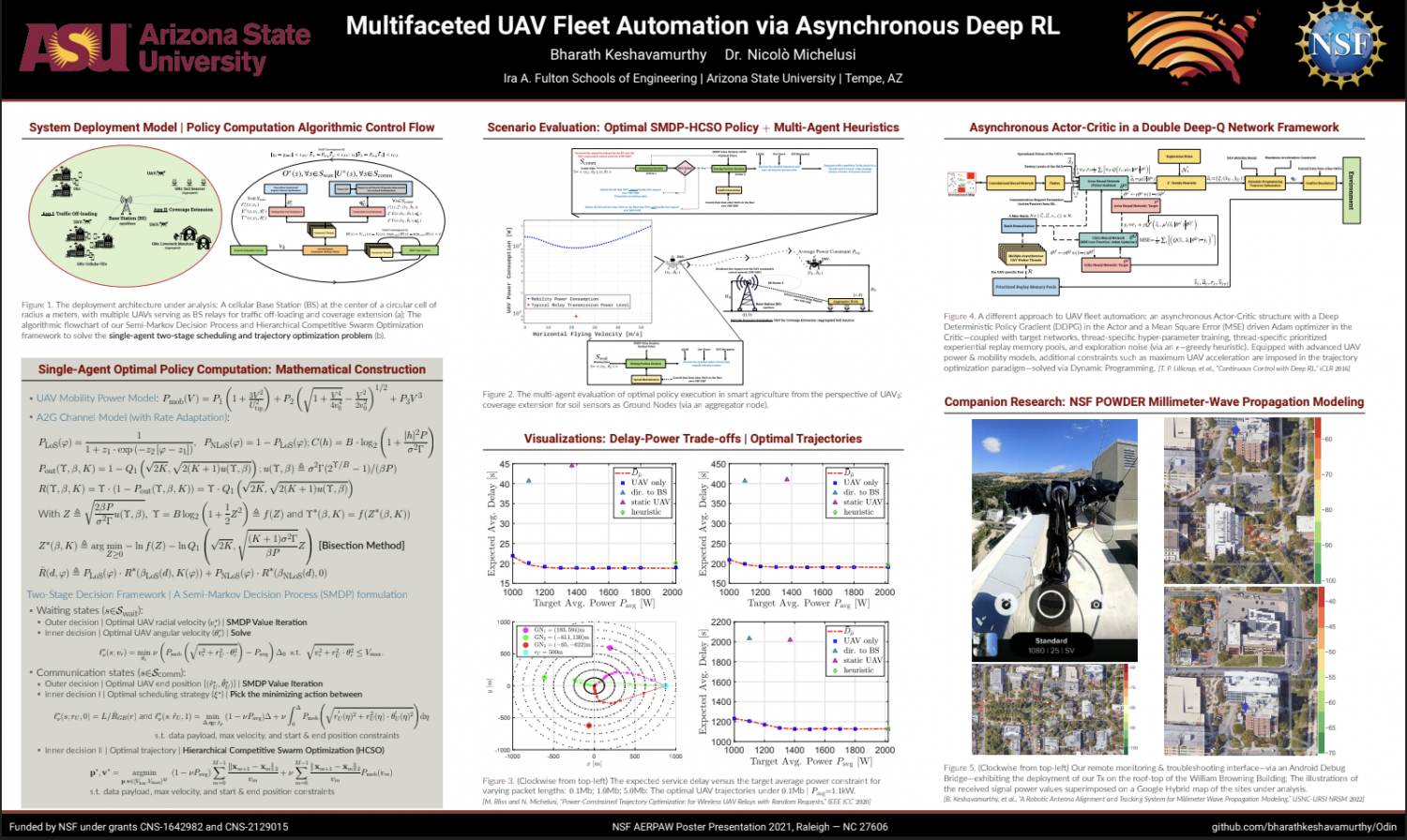
Example of a deployment architecture considered in this project: A cellular Base Station (BS), with multiple UAVs serving as BS relays for traffic off-loading and coverage extension.
Personnel
Principal Investigator: Prof. Nicolò Michelusi, Arizona State University
Graduate students: Bharath Keshavamurthy, Arizona State University
Synopsis
The demand for wireless broadband is growing in the United States and across the world. Unmanned aerial vehicles (UAVs) are envisioned as key components of 5G wireless technology and beyond: thanks to their low cost, improved line-of-sight over terrestrial base stations, and controllable mobility, they will enable low-cost wireless broadband access. Nonetheless, UAVs’ integration into wireless networks poses unique challenges on the network and physical layers, due to the intricate coupling between trajectory design and communication resources to be jointly optimized, and uncertain air-to-ground channel propagation conditions. Furthermore, UAVs need to seamlessly operate under sources of randomness and uncertainty typical of wireless networks. This project aims to design techniques to enable real-time physical-layer adaptation of the communication resources, and adaptive trajectory designs to optimize communication performance and energy-efficiency of the system. This research addresses the global industrial and societal need for ubiquitous wireless broadband access by enabling a cost-effective integration of UAVs into wireless networks. This research integrates an educational and outreach program designed to foster research interests and participation of underrepresented students in electrical engineering, through activities created in collaboration with programs at ASU and local high schools.
This project develops a novel decision-making framework to address the critical need for adaptation in UAV-assisted wireless networks operating under uncertainty. Adaptive techniques are developed that leverage the high mobility of UAVs to optimize communication metrics such as latency, throughput, outage probability, area spectral efficiency, energy efficiency, by focusing on the interplay between network-level optimization and physical-layer communication, trajectory design, and control. A key novelty is a multi-scale decision framework to achieve scalable design. The framework leverages multiple spatio-temporal scales induced by the coupling between trajectory and channel propagation conditions to centralize slow timescale trajectory decisions and decentralize fast timescale communications decisions. The design aspect leverages unique features of single- and multi-antennas, operating at sub-6GHz or millimeter-wave frequencies, and provides adaptation to uncertain and dynamic channel conditions. The second goal consists of designing adaptive multi-UAV wireless systems, including UAV selection, user association, resource allocation, optimal charging schedules to enable uninterrupted operation, and contention-based access schemes to improve coverage and grant-free access. The research results are tested experimentally on NSF PAWR AERPAW by designing a software-defined-radio implementation. The experimental results are integrated into theoretical models for continuous improvement and testing.
This award reflects NSF’s statutory mission and has been deemed worthy of support through evaluation using the Foundation’s intellectual merit and broader impacts review criteria.
Collaborators
Prof. David J. Love, Purdue University
Prof. Jim V. Krogmeier, Purdue University
Tzu-Hsuan Chou, Purdue University
Matthew Bliss, Purdue University
Publications and Research Results
- B. Keshavamurthy and N. Michelusi, “Learning-based Spectrum Sensing and Access in Cognitive Radios via Approximate POMDPs,” in IEEE Transactions on Cognitive Communications and Networking, doi: 10.1109/TCCN.2021.3129802.
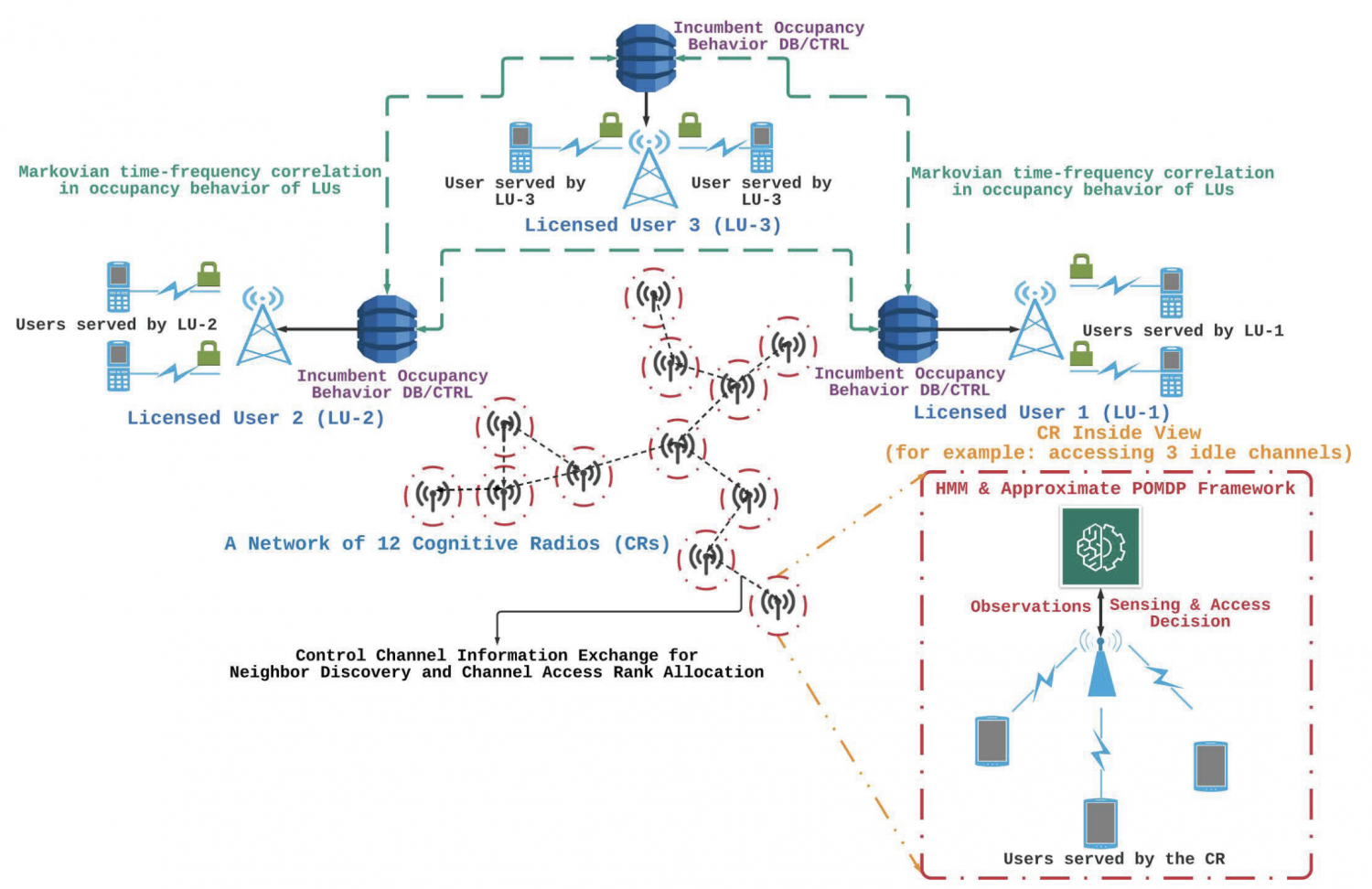
A novel LEarning-based Spectrum Sensing and Access (LESSA) framework is proposed, wherein a cognitive radio (CR) learns a time-frequency correlation model underlying spectrum occupancy of licensed users (LUs) in a radio ecosystem; concurrently, it devises an approximately optimal spectrum sensing and access policy under sensing constraints. A Baum-Welch algorithm is proposed to learn a parametric Markov transition model of LUs’ spectrum occupancy based on noisy spectrum measurements. Spectrum sensing and access are cast as a Partially-Observable Markov Decision Process, approximately optimized via randomized point-based value iteration. Fragmentation, Hamming-distance state filters and Monte-Carlo methods are proposed to alleviate the inherent computational complexity, and a weighted reward metric to regulate the trade-off between CR’s throughput and interference to the LUs. Numerical evaluations demonstrate that LESSA performs within 5% of a genie-aided upper bound with foreknowledge of LUs’ spectrum occupancy, and outperforms state-of-the-art algorithms across the entire trade-off region: 71% over correlation-based clustering, 26% over Neyman-Pearson-based spectrum sensing, 6% over the Viterbi algorithm, and 9% over adaptive Deep Q-Network. LESSA is then extended to a distributed Multi-Agent setting (MA-LESSA), by proposing novel neighbor discovery and channel access rank allocation. MA-LESSA improves CRs’ throughputs by 43% over cooperative TD-SARSA, 84% over cooperative greedy distributed learning, and 3× over non-cooperative learning via g-statistics and ACKs. Finally, MA-LESSA is implemented on the DARPA SC2 platform, manifesting superior performance over competitors in a real-world TDWR-UNII WLAN emulation; its implementation feasibility is further validated on an ad-hoc distributed wireless testbed of ESP32 radios, exhibiting 96% success probability.
- M. Bliss and N. Michelusi, “Power-Constrained Trajectory optimization for Wireless UAV Relays with Random Requests,” ICC 2020 – 2020 IEEE International Conference on Communications (ICC), 2020, pp. 1-6, doi: 10.1109/ICC40277.2020.9149029.

This paper studies the adaptive trajectory design of a rotary-wing UAV serving as a relay between ground nodes dispersed in a circular cell and a central base station. Assuming the ground nodes generate uplink data transmissions randomly according to a Poisson process, we seek to minimize the expected average communication delay to service the data transmission requests, subject to an average power constraint on the mobility of the UAV. The problem is cast as a semi-Markov decision process, and it is shown that the policy exhibits a two-scale structure, which can be efficiently optimized: in the outer decision, upon starting a communication phase, and given its current radius, the UAV selects a target end radius position so as to optimally balance a trade-off between average long-term communication delay and power consumption; in the inner decision, the UAV selects its trajectory between the start radius and the selected end radius, so as to greedily minimize the delay and energy consumption to serve the current request. Numerical evaluations show that, during waiting phases, the UAV circles at some optimal radius at the most energy efficient speed, until a new request is received. Lastly, the expected average communication delay and power consumption of the optimal policy is compared to that of static and mobile heuristic schemes, demonstrating a reduction in latency by over 50% and 20%, respectively.
- M. Bliss and N. Michelusi, “Trajectory Optimization for Rotary-Wing UAVs in Wireless Networks with Random Requests,” 2019 IEEE Global Communications Conference (GLOBECOM), 2019, pp. 1-6, doi: 10.1109/GLOBECOM38437.2019.9013307.
Presentations
Poster presentation at the NSF AERPAW Fall Event in 2021 at NCSU (developed and presented by grad student Bharath Keshavamurthy)
Code
The code developed in this project will be made available through the website to the broader research community.
Educational activities
- In the Fall 2021 semester, the PI Michelusi developed and taught a new graduate-level course titled “Learning-Based Sequential Decision-Making Under Uncertainty,” which covered the fundamental theory, algorithms, and applications of Markov decision processes in observable and partially observable domains, reinforcement learning, and approximate methods (including deep reinforcement learning). These are important tools in the design of adaptation techniques in dynamic wireless systems, such as UAV-aided wireless systems covered in this project. The course is scheduled again for Spring’23.
- In the Spring 2022 semester, the PI Michelusi is currently developing and teaching a new grad course on “Digital and Wireless Communications.” The course covers the fundamental theory underpinning modern digital wireless systems, and teaches students tools to analyze, design and simulate wireless systems. The course is scheduled again for Fall’22.
Outreach and other broader impact outcomes
Advanced wireless communications are already impacting nearly every human being. Some areas that have not historically been impacted by communication and networking advances are starting to become influenced. These include the automotive and agricultural industries. Our work on UAV-aided communications will have a transformational impact on the next generation of wireless communications that will likely indirectly influence a variety of industries, including the automotive and agricultural domains.
The ultimate goal of this research is to provide technical solutions to meet the demanding challenges of 5G (1000x increase in capacity, 10x reduction in latency, 100x increase in density of mobile devices). Thus, our research is likely to contribute to the success of 5G and will benefit society through the plethora of applications that 5G promises — Internet of things to improve automation of transportation systems, home management for instance; supporting the increase in demand for mobile high throughput services such as virtual reality; lower the cost of deployment of communication systems, and thus provide benefits to rural or underdeveloped areas with limited access to the internet.