Past Projects
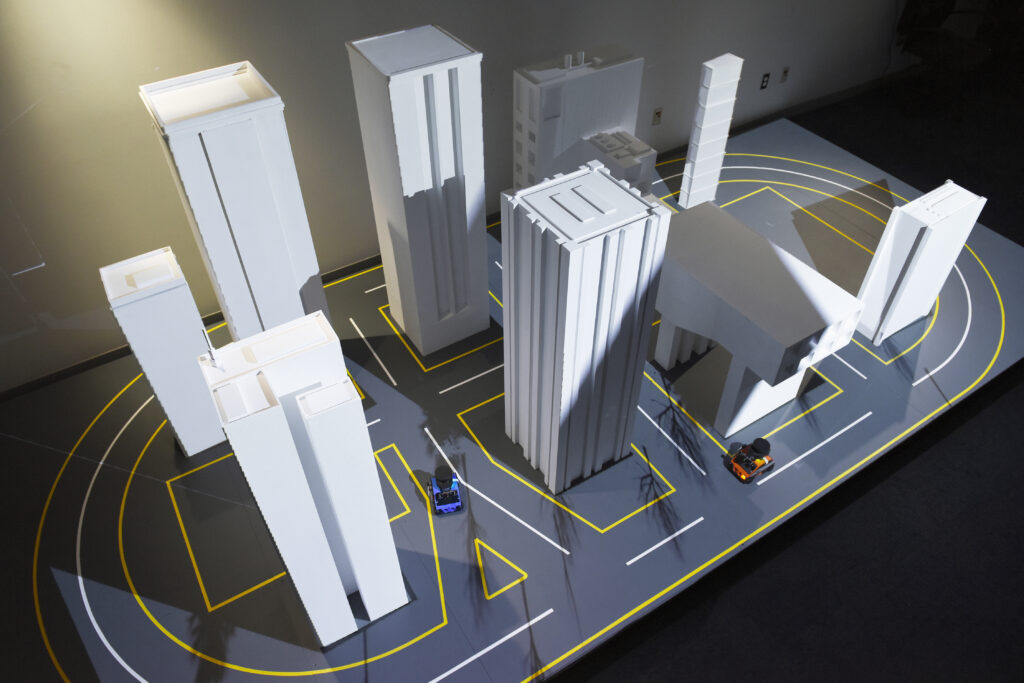
Embodiment of Human Values Profiles in the Control of Autonomous Vehicles (2022-2024)
PI: Prof. Kathryn Johnson (ASU); Other Co-PI (ASU): Prof. Theodore Pavlic
Goal: Develop a framework for generating autonomous vehicle responses to uncertain, dynamic situations, executed at short time scales, that align with human values and moral priorities, using data collected from driving trials in a simulated environment and a small-scale physical testbed with robotic vehicles.
Funding: NSF M3X EAGER Award #2146691
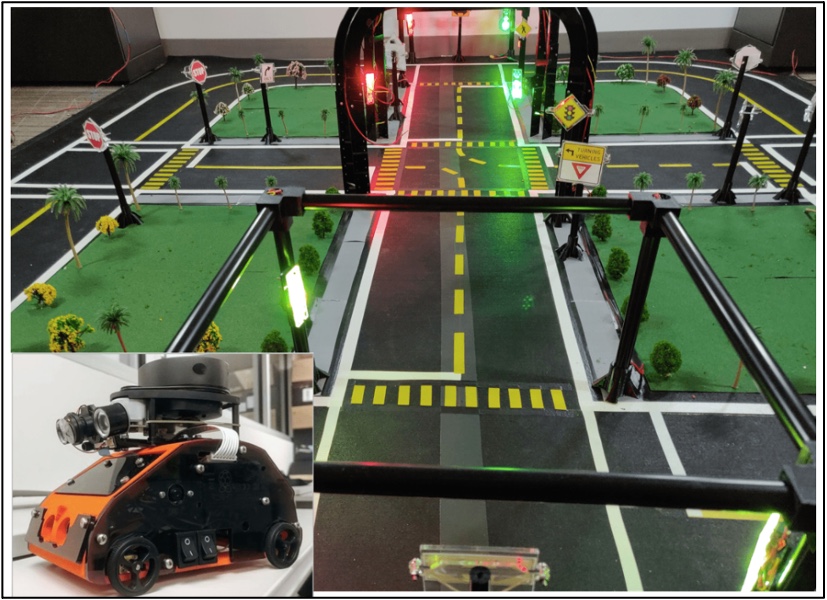
NRT: Citizen-Centered Smart Cities and Smart Living (2018-2024)
PI: Prof. Troy McDaniel (ASU); Co-PIs (all at ASU): Prof. Ram Pendyala, Prof. Cynthia Selin, Prof. Katina Michael
Goal: Train the next generation of master’s and doctoral students to become future Smart City thought leaders, scientists, entrepreneurs, research scholars, policy makers, and engineers through an integrated and interdisciplinary focus on the technological, societal and environmental research aspects of citizen-centered solutions for Smart Cities.
Funding: NSF Research Traineeship (NRT) Program Award #1828010
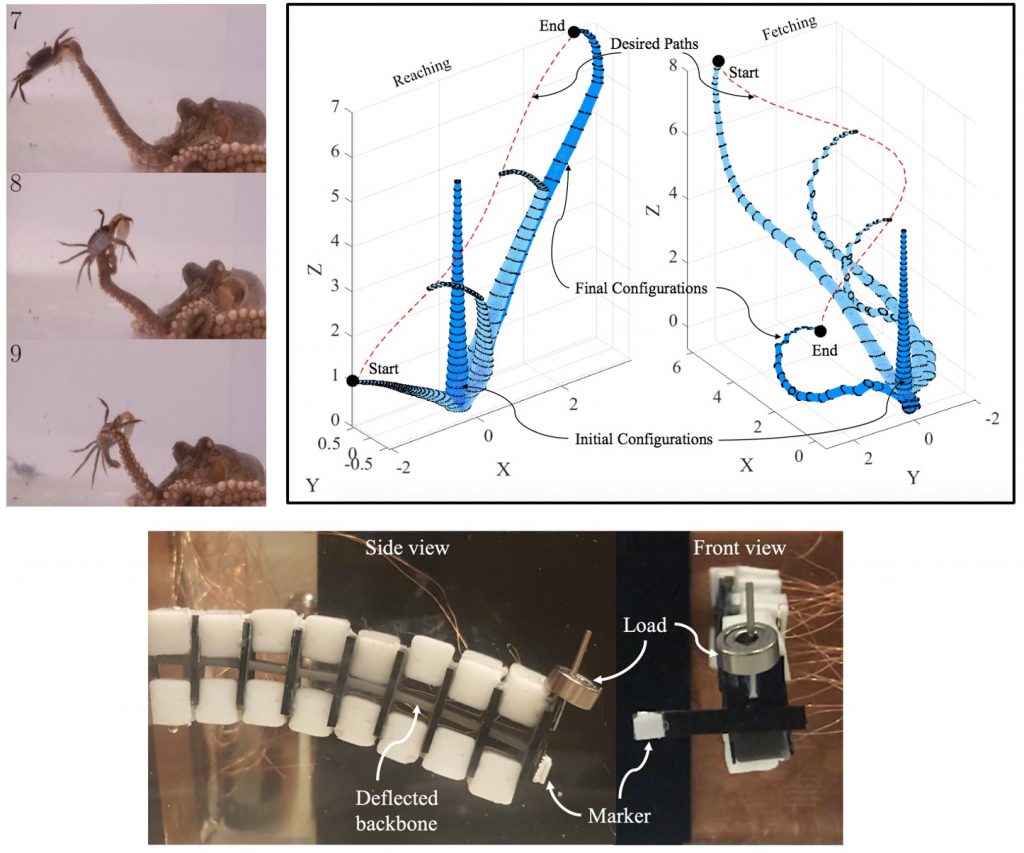
Octopus-Inspired Autonomous Arms for Soft Robots with Adaptive Motions (2017-2022)
PI: Prof. Ximin He (UCLA); Other Co-Is: Prof. Daniel Aukes (ASU), Prof. Hamid Marvi (ASU), Prof. Matthew Peet (ASU), Prof. Rebecca Fisher (University of Arizona)
Goal: To develop a framework for the modeling, design, rapid prototyping, and control of autonomous soft robotic arms with a novel force-responsive hydrogel material and octopus-inspired distributed neuromuscular sensing and actuation.
Funding: ONR Basic Research Challenge Award #N00014-17-1-2117

A Testbed for Research on Distributed Human, Artificial Intelligence and Robot Teaming (2020-2021)
PI: Prof. Nancy Cooke (ASU); Other Co-Is (all at ASU): Prof. Lance Gharavi, Dr. Lixiao Huang, Prof. Wenlong Zhang, Prof. Erin Chiou, Prof. Yu Zhang, Prof. Subbarao Kambhampati
Goal: Develop a testbed in which to study distributed human, artificial intelligence, and robot teaming, in order to conduct research projects on scenarios in which effective human-autonomy teaming is critical to mission success.
Funding: ONR Defense University Research Instrumentation Program (DURIP) Award
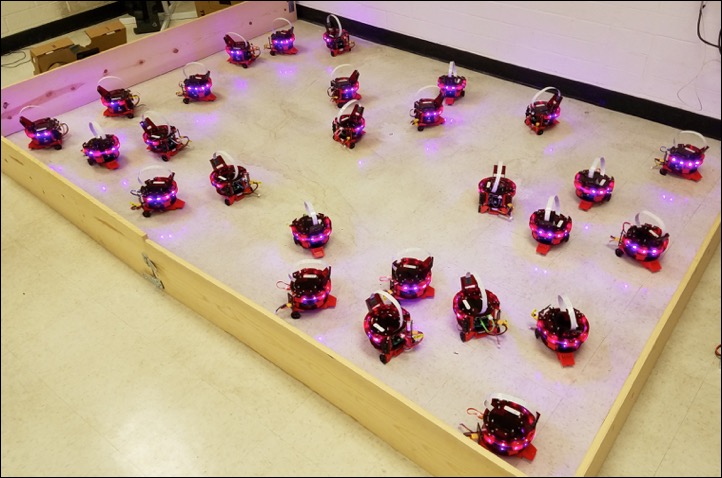
Resilient Collective Systems (2016-2021)
Goal: To advance the state-of-the-art in the prediction, control, and programming of swarm robotic collective behaviors, in collaboration with ASU faculty from multiple disciplines; to strengthen and promote ASU’s research capabilities in the area of biologically-inspired collective behaviors.
Funding: Arizona State University Strategic Initiative Funds: Global Security Initiative

Developing and Signaling Trust in Synthetic Autonomous Agents (SAAs) (2018-2019)
PI: Prof. Kathryn Johnson (ASU); Other Co-Is (ASU): Prof. Erin Chiou, Prof. Adam Cohen
Goal: To draw on social psychological research in order to program synthetic autonomous agents (e.g., self-driving cars) to make decisions and behave with moral integrity, and to identify the most efficacious signal of programmed moral integrity in order to garner appropriate trust from human operators and the general public.
Funding: DARPA Polyplexus Pilot Program
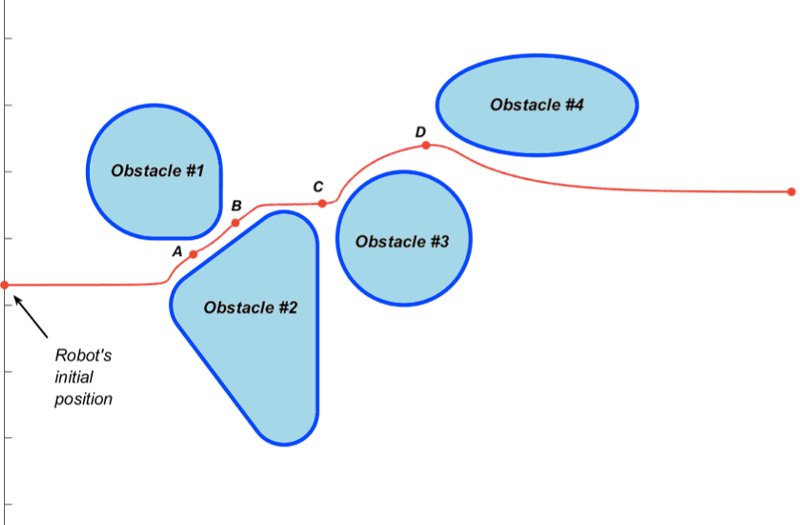
Scalable Control of Adaptive Multi-Robot Systems in Inaccessible Environments (2016-2019)
Goal: To develop a rigorous methodology for real-time control and observation of multi-robot systems in uncertain, inaccessible environments with limited or absent GPS and communication.
Funding: ONR Young Investigator Award #N00014-16-1-2605
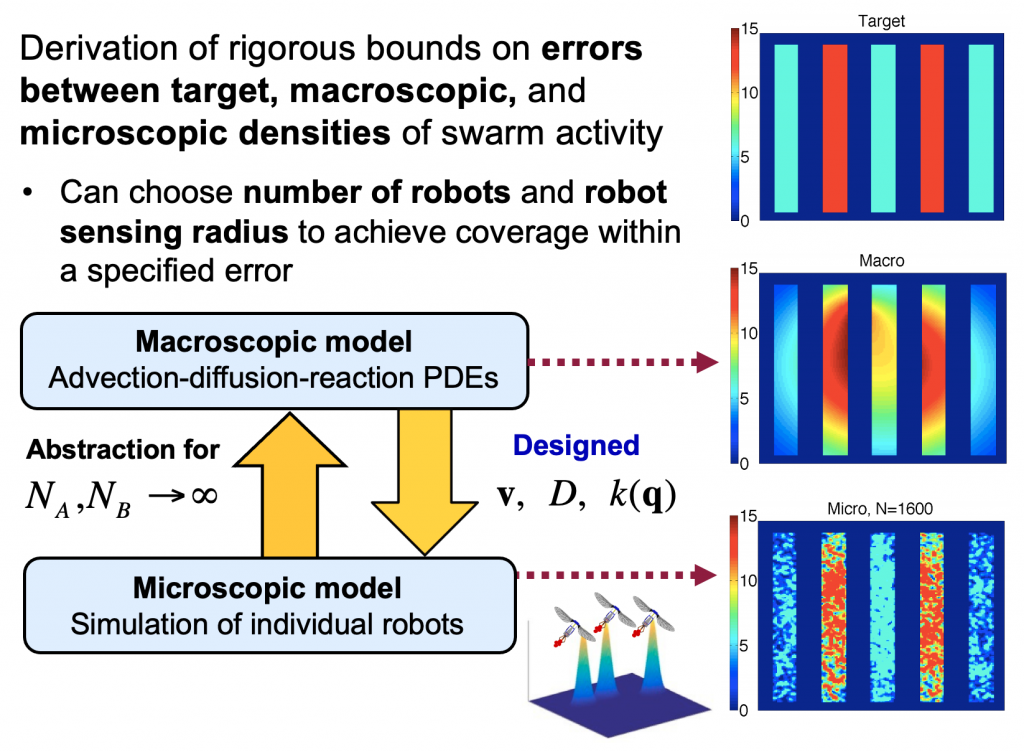
Collaborative Research: Modeling, Analysis, and Control of the Spatio-temporal Dynamics of Swarm Robotic Systems (2014-2018)
Co-PI: Prof. Andrea Bertozzi (UCLA)
Goal: To develop a formal methodology for analyzing and controlling the spatiotemporal dynamics of robotic swarms that are deployed in complex unknown environments for mapping and coverage tasks.
Funding: NSF Sensors, Dynamics, & Control Program Award #1436960
A Scalable Control Framework for Boundary Coverage and Cooperative Manipulation by Robotic Swarms (2014-2017)
Goal: To develop a rigorous top-down control framework for swarm robotic boundary coverage and manipulation tasks in unknown environments using only local sensing and common broadcast information.
Funding: NSF Sensors, Dynamics, & Control Program Award #1363499
Specification and Control of Customizable Multi-Robot Systems for Distributed Sensing and Cooperative Manipulation (2014-2016)
Goal: To enable non-expert users to automatically determine the physical and functional composition of customizable multi-robot systems that optimize sensing and manipulation performance metrics in realistic environments.
Funding: DARPA Young Faculty Award #D14AP00054