Research
Research Interests
- Connected and Automated Vehicles (CAV)
- Battery Electric Vehicles (BEV)
- Battery Management System (BMS)
- CAV system integration and safety assessment
- Motion planning and controls
- Cooperative perception
- AI/ML in automotive and robotics systems
- Intelligent Transportation Systems (ITS)
Research Projects
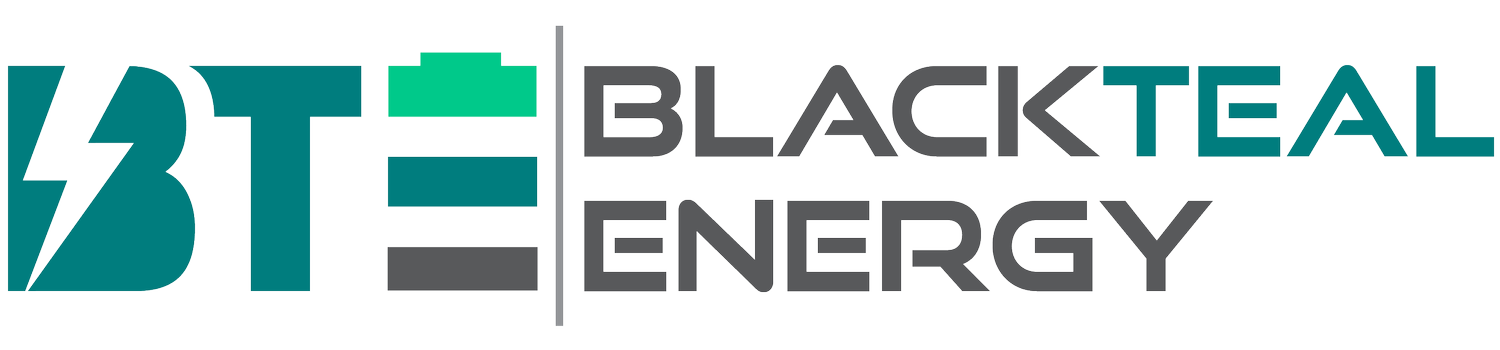
AI-Powered Universal Battery Management System
Sponsor: BlackTeal Energy, Greater Phoenix Economic Council
PI: Prof. Junfeng Zhao
The integration of AI and Digital Twin technologies into Battery Management Systems (BMS) represents a transformative shift in energy storage management. These cutting-edge solutions address key challenges faced by traditional BMS, such as inefficiencies in state estimation, data fragmentation, and thermal management issues. By incorporating AI and Digital Twins, the proposed Unified Battery Management System (U-BMS) framework significantly enhances system performance, extends battery life, and improves compatibility and safety.
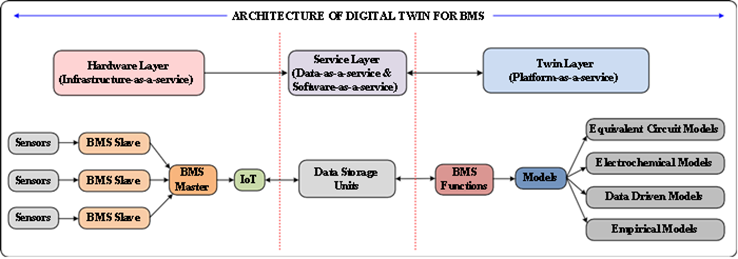
Development of an Operational Safety Testing Platform for Automated Vehicles
Sponsor: Arizona Commerce Authority, Science Foundation of Arizona
PI: Prof. Junfeng Zhao
The industry has progressed to a point where automated vehicles (AVs) are being deployed in limited commercial applications in select locations, including Arizona. However, whether the AV is commercially deployed or is a prototype being tested on public roads, the operational safety is unknown. Arizona State University, in collaboration with Science Foundation Arizona (SFAz), is developing an operational safety assessment (OSA) method to address this critical gap in public safety related to CAVs. The OSA method includes a mix of simulation, closed course, and public road scenario-based testing in order to assess the operational safety of the vehicle in thousands of scenarios, including difficult edge cases. The OSA method includes a mix of simulation, closed course, and public road scenario-based testing in order to assess the operational safety of the vehicle in thousands of scenarios, including difficult edge cases. The objective of the proposed project is to develop a platform that (1) enables sufficiently accurate simulation results through the creation of a high-fidelity model, known as a Digital Twin (DT), of a research CAV purchased by the ASU PI and (2) ensures more edge cases are encountered in closed course and public road testing by adding Augmented Reality (AR) capability to the research CAV. The proposed platform will allow for thousands of scenarios to be tested in simulation much faster and more cheaply than with the research CAV, which allows the latter to test a subset of scenarios for validation of the simulation results purposes, some of which will have AR-injected objects added to the research vehicle’s environment.
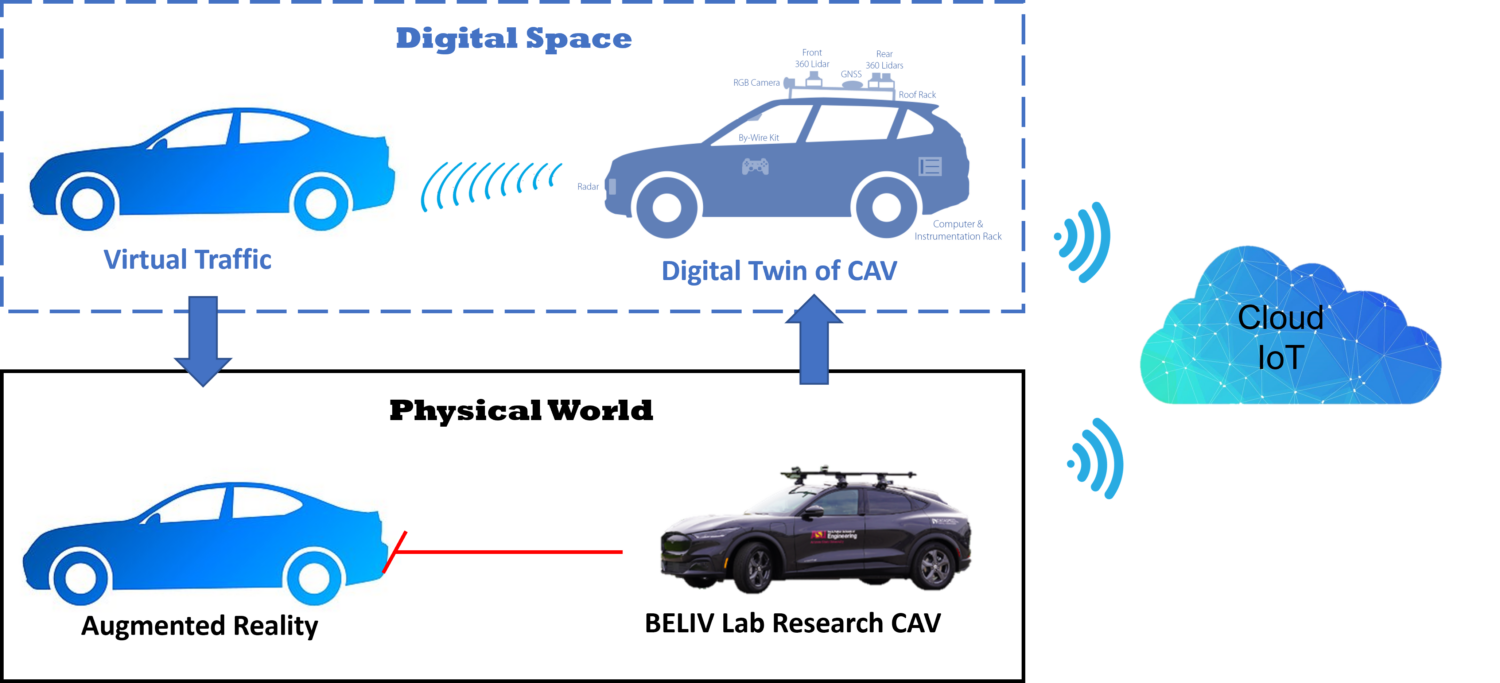
Intelligent Parking Guidance through AI and IoT to Empower Drivers and Autonomous Vehicles
Sponsor: Cox Communications, Inc., ASU-Cox Collaboratory
PI: Prof. Junfeng Zhao
Finding an open parking space at congested parking lots in urban centers, commercial areas, and public spaces is often time-consuming and frustrating, leading to wasted fuel, and increased greenhouse gas emissions. Another concern in parking lots is the occurrence of traffic accidents, often caused by distracted drivers searching for parking spaces or navigating through congested lots. It is challenging not just for human drivers but also for Robotaxi or vehicles that can be summoned to parking lots. We need an innovative navigation solution to ease the parking process for human drivers and autonomous vehicles (AVs), and make it safer, more convenient, and environmentally friendly.
Sponsors